|
Jawa Babetta Electric Petrol Hybrid |
|||||||||||||||||||||||
| All
eff-too specials are built personally by David Angel at F2 Motorcycles
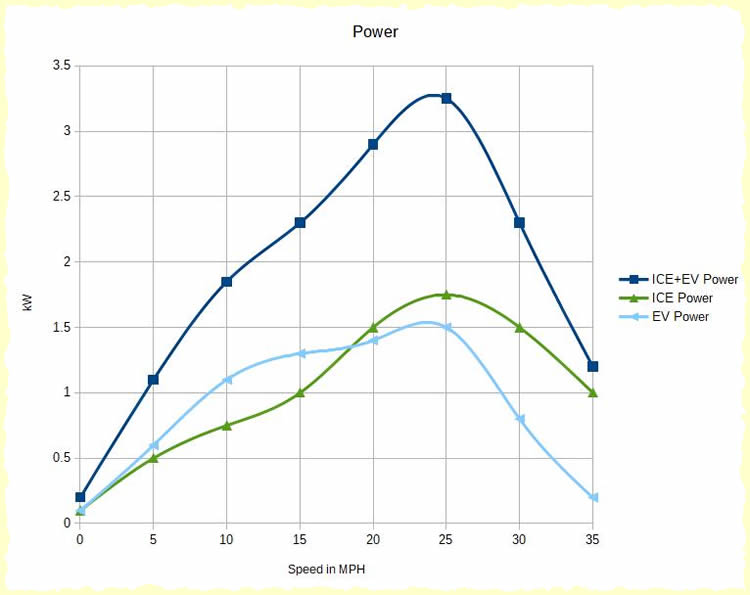
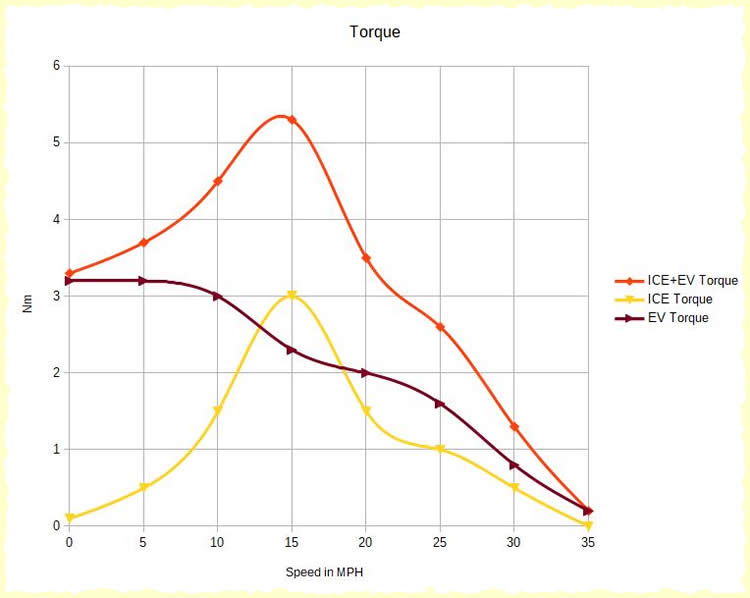
Ltd's Fenland workshop. Hi all, sometimes I get an idea and it won't go away. It plays on my mind and the only way to make it stop is to build the thing that's in my head. So here goes. The idea is fairly simple. Small 2-stroke single speed pedal and pop mopeds lack torque but use very little fuel once cruising. Electric motors on the other hand produce loads of torque from zero rpm but using them to cruise uses lots of power and limits range. I'm certainly not the first person in the world to reason that combining the torque of an electric motor with a gutless but economical petrol engine might produce something useful. Toyota really started something with their hybrids and others have followed. The choice of moped was simple for me. F2 Motorcycles Ltd are the UK's Jawa importer so the moped would need to be an old Jawa Babetta. These mopeds are monumentally simple being an engine in a frame connected to the rear wheel with a chain. Mine is single speed, so no gearbox, auto or otherwise. A set of pedals turn the back wheel and this moves the moped like a bicycle, or if you engage a dog clutch the pedals not only move the moped forward but also start the engine. Once started, opening the throttle wide will eventually liberate 1.75 kw or about 2.3 bhp of power. I managed to source a suitable Babetta to use as a starting point from the ever helpful and very knowledgeable John Woods from the Jawa-CZ Owners Club. John has an excellent Jawa moped page which is linked at the bottom of this story. Now on to the electric motor. There are lots of hub motors on the internet designed for electric bikes, but unfortunately they all have the same problem, which is low maximum rpm. Being designed for bicycles, and with bicycles generally having large wheels of 26 inch and above, the maximum rpm is not an issue for the intended use. The Jawa Babetta has 16 inch wheels, and a bit of tapping on a calculator indicated that I would need somewhere in the region of 600 rpm, but most of the hub motors are rated at about 450 rpm even under zero load. Interesting fact about electric motors, max rpm is governed by input voltage. Great, that solves the rpm problem, simply over-volt a 48 volt motor with a 60 volt battery and controller. Current makes heat, heat kills stuff, so when over-volting it is important to limit the maximum current to something sensible. In the end I opted for a 48 volt 1000 watt motor being controlled by a 60 volt 22 amp continuous (45 amp peak) full sine wave controller. This gives 610 rpm with zero load, 1320 watt continuous if needed, and plenty of safety margin for peak load under acceleration.
So the theory seemed sound and all the parts were in the workshop ready to assemble. Everything performed roughly as expected on a test stand. Now for the build. I won't bore you with every detail of every part of the build. The hub motor was laced to the rim with custom made stainless spokes. The forks where extensively modified to accept the front hub and allow the fitting of a 180mm mountain bike disc brake. Pannier frames were made from steel sourced from Jawa packing crates. The motor and controller wiring was extended using higher current wiring. The throttle cable was split before the carburetor to allow an EV throttle to be mounted in one pannier. One odd thing about this Jawa Babetta was the complete lack of brake light or horn. Apparently in the Czech Republic where they are made, they don't need them, and somehow they occasionally arrive in the UK, and get registered and used without ever having them fitted. Initially I spliced into the AC feed to the front light and wired in a brake light and AC horn. The horn was pathetic, making a squeak that varied with the engine revs and the brake light blew unless the front light was kept permanently switched on. To be fair, John had warned me that this might happen, but I had to find out for myself. There is a little storage tray behind the seat on the Babetta so I fitted a battery holder taking two 18650 rechargeable batteries, and ran the brake light and horn from these. They give about 7.6 volts and a 2.2 AH capacity, so they run the brake light for weeks between charges giving over 1000 presses of the brake per charge.
Once built the maiden voyage had to be to the MOT centre, partly to keep everything legal but also to check that the brakes where actually up to an acceptable standard. It passed the MOT with no advisories, but the ride did bring up two issues for me. The original shock absorbers are just springs, there is no damping at all. I had added about 20 kg to the weight of the bike and I'm not a light weight, so the end result was a very bouncy ride with the occasional bottoming out of the springs. A set of C90 rear shocks transformed the handling and ride quality. The other issue was that I had routed the throttle cable to the electric motor throttle in a way that allowed me to dislodge it with my heel, so this was sorted. So what's it like to ride? Firstly, one of the best features is that it is now electric start, no more peddling to start the engine, simply pull away under electric power (EV) and the petrol engine (ICE) cuts in. The dashboard gives lots of information and allows the strength of the electrical assistance to be changed even on the move. There are 6 levels altogether: EV0 to EV5. EV0 is the electric motor turned off, but the dashboard still working as a speedometer, trip meter, etc. EV5 is the strongest assistance peaking at about 2 kw under acceleration. Obviously the bike is now two wheel drive when using both the ICE and EV together. The 2WD had been my biggest worry as I had no way of judging how it would feel on the road. The answer is great, with the ICE running together with any of the EV modes, the front really pulls you round the corner. On anything other than dry smooth tarmac EV5 tends to be a bit much as it can spin the wheel a little. On gravel tracks ICE+EV2 is great and it feels much like 4WD in a car. It can be ridden in any of three different modes: 1. As intended by Jawa ICE
only The speedometer has been calibrated using GPS so all of the data is accurate, unlike the original speedometer fitted to the bike that indicated 33 mph at a real world speed of 27 mph. The low end torque from the electric motor makes a huge difference to how the bike feels, it changes the sluggish acceleration to rather nippy. There is a slight improvement in maximum speed. Maximum speed ICE only is 26.9 mph, in EV5 with no ICE it is 29 mph and combining them in ICE+EV5 mode gives 32 mph. It's the acceleration that is most affected. In ICE only mode it takes 8.6 seconds to reach 15 mph and a sleep inducing 22.8 seconds to reach 25 mph. In ICE+EV5 mode these figures reduce to 3.8 seconds to 15 mph, and a positively sprightly 6.8 seconds to 25 mph. OK, this isn't going to impress your average performance bike rider, but that isn't the point.
I tend to ride in ICE+EV4 most of the time. This mode gives a nice balance between handling, acceleration and power consumption. Max speed is 29 mph, it takes just under 8 seconds to get to 25 mph and pulls well into a head wind without dropping too much speed. The main saving over ICE+EV5 is in battery range. ICE+EV5 riding flat out consumes between 800 and 1200 watts depending on head wind or gradient, so a rough average of 1000 watts. Riding in the same way in ICE+EV4 mode is only 1 or 2 mph slower, has a barely noticeable impact on acceleration, but uses an average of 300 watts when cruising along. Range is not an issue because even if the battery were completely flat the ICE would still power me home, but why use it if it's not needed. In terms of range, the battery has 1200 watt hours (Wh) storage, so using ICE+EV5 at 1000 watt average consumption it will run for 1.2 hours at a speed of 32 mph, so about 38 miles. By using ICE+EV4 the range is increased to about 116 miles. Ridden as a pure electric vehicle, performance is good, but the range drops dramatically. In EV5 only mode the max speed is 29 mph and 0 to 25 takes 12.5 seconds but the range is reduced to 25 miles and the motor is working very close to its limit all the time. However using EV4 in traffic seems okay, the top speed is only 25 mph but acceleration is still brisk, and the range is about 40 miles with no risk of cooking the motor. EV1 mode offers very nearly the same performance as a standard pedelec ebike with a top speed of 15 mph and a range of 72 miles. The legalities of riding a fully registered and plated moped on a bicycle lane as a ebike is not something I wish to explore, but it is an interesting comparison with ebike range and performance. So that's it folks. I had an idea, the theory seemed to work, and the build has proved the concept. Is it commercially viable? No way, not even slightly, the cost of good quality batteries and controllers at the moment (in 2020) plus the huge amount of labour modifying and retro fitting all the hardware takes the cost way above what any sane person would be willing to pay for a slightly nippy moped. If a manufacturer with a slightly bigger R&D budget than me took the concept and applied some clever electronics to get the best from it, I can see a 200cc motorcycle easily capable of the national speed limit, and with a big dollop of low end grunt being an affordable and fun proposition. If they got it right it could run fully EV in towns up to about 35 mph and ICE+EV out of town using the EV just to add some grin inducing torque while relying on an economical modern ICE to give a practical range. David, F2 Motorcycles Ltd. |
|||||||||||||||||||||||
|
|||||||||||||||||||||||
| |
|||||||||||||||||||||||